雷达在新型汽车设计中随处可见:在汽车周围进行感知,以侦测危险,并为制动、转向和停车决策提供信息;在车厢内用于驾驶员和乘员监控系统。
现在,高清雷达在任何天气条件下都能有效地进行基于人工智能的前端物体探测,与其他传感器通道相辅相成,进一步提高了准确性和安全性。对于构建高价值嵌入式雷达系统的制造商来说,市场潜力巨大。然而,如何有竞争力地发掘这一潜力却充满挑战。本文探讨了其中一些挑战。

全系统挑战
汽车原始设备制造商(OEM)并不仅仅是在新车上增加更多的电子功能;他们正在为其产品线推动统一的系统架构,以管理成本、简化软件开发和维护,并提高安全性。更多的计算和智能正在向集成的区域控制器转移,一方面,在汽车小区域内相对较小的传感器单元与处理器进行通信,另一方面,区域控制器与负责整体决策的中央控制器之间进行通信。
针对汽车雷达系统市场的供应商必须跟踪这些变化,以确保他们的解决方案架构能够与这些变化保持一致。供应商需要提供一种可扩展性,使得他们的解决方案能够在边缘功能的相对简单处理和区域或中央控制器的更广泛功能之间实现适度的处理能力,同时还必须具备灵活性,以适应不同汽车制造商的分区选择。
重要的一个点在于,无论解决方案如何分区,都必须允许在边缘、区域和中央计算之间交换大量数据。这就凸显了在传输过程中压缩数据以控制延迟和功耗的重要性。
除了性能、功耗和成本限制外,汽车系统还必须考虑使用寿命和可靠性。汽车的整个使用寿命可能是10年、20年甚至更长,在此期间可能需要对软件和人工智能模型进行升级,以解决检测到的问题或满足不断变化的监管要求。这些限制条件决定了在雷达系统设计中要在硬件的性能/低功耗和软件的灵活性之间保持谨慎的平衡。这并不是什么新鲜事,但与视觉管线相比,雷达管线有一些独特的需求。
管线挑战
完整的雷达系统流程如下图1所示,从发射和接收天线一直到目标跟踪和分类。天线配置可从用于低端探测的 4x4(发射/接收)到用于高清雷达的48x64。在雷达前端之后的系统管线中,FFT首先计算距离信息,然后计算多普勒信息。接下来是数字波束成形阶段,用于管理来自多个雷达天线的数字流。
到目前为止,这些数据从某种程度上来说仍然是“原始信号”。CFAR(恒虚警率)阶段是将真实目标从噪声中分离出来的第一步。到达角度(AoA)的计算完成了一个目标在三维空间中的定位,而多普勒速度计算添加了第四个维度。最后,管线进行目标跟踪,比如利用扩展卡尔曼滤波器(EKF),并通常使用OEM定义的人工智能模型进行目标分类。
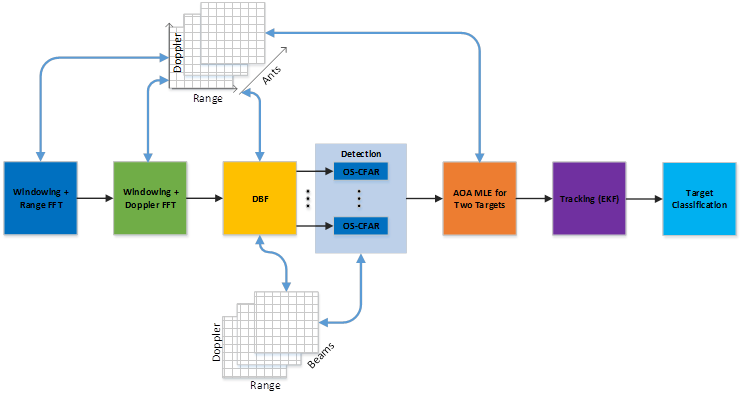
图1:完整雷达系统管线示意图
步骤很多,但这些步骤为何如此复杂?首先,雷达系统必须在前端支持显著的并行性,以处理大型天线阵列,通过管线同时推送多个图像流,同时实现每秒25到50帧的吞吐量。数据量不仅受天线数量的限制。这些天线馈送多个FFT,每个FFT都可能相当大,高达1K个频率点。这些转换最终会将数据流转化为点云,而点云本身可以轻松达到半兆字节。
巧妙的内存管理对于最大化吞吐量至关重要。以距离和多普勒FFT阶段为例。从距离FFT写入内存的数据是一维的,按行写入。多普勒FFT需要按列访问这些数据;如果没有特殊的支持,按列访问所隐含的地址跳转需要每列进行多次突发读取,从而大大降低了可行的帧速率。
另一个挑战是CFAR。有多种CFAR算法,其中一些比其他算法更容易实现。如今最先进的方案是OS-CFAR(有序统计CFAR),特别适用于存在多个目标的情况(这在汽车雷达应用中很常见)。可惜,OS-CFAR也是最难实现的算法,除了线性分析外,还需要统计分析。如今,一个真正有竞争力的雷达系统应该使用OS-CFAR。
在跟踪阶段,位置和速度都很重要。位置和速度都是三维的(X,Y,Z表示位置,Vx,Vy,Vz表示速度)。一些EKF算法会各放弃一个维度,通常是高度,以简化问题;这被称为4D EKF。相比之下,高质量的算法会使用全部6个维度(6D EKF)。对于任何EKF算法来说,一个重要的考虑因素是它可以跟踪多少目标。飞机可能只需要跟踪几个目标,而高端汽车雷达现在可以跟踪数千个目标。在考虑高端和(一定程度上缩小的)中端雷达系统的架构时,这一点值得牢记。
分类阶段的任何挑战都是以人工智能模型为中心的,因此不在本雷达系统的讨论范围之内。这些人工智能模型通常会在一个专用的神经处理单元(NPU)上运行。
实施挑战
一个显而易见的问题是,什么样的平台才能最好地满足所有这些雷达系统需求?它必须具有很强的信号处理能力,必须在低功耗的情况下满足吞吐量目标(25-50帧每秒),同时还必须具有软件可编程性,以适应较长的使用寿命。这意味着需要一个DSP。
然而,它还必须同时处理多个输入流,这就需要高度的并行性。一些DSP架构支持并行内核,但是所需核心数量可能对于许多信号处理功能(例如FFT)来说过多,这种情况下硬件加速器可能更合适。
同时,解决方案必须在区域车辆架构之间具有可伸缩性:为边缘应用提供低端系统,为区或中心应用提供高端系统。为每种应用提供通用的产品架构和通用的软件堆栈,只需进行简单的扩展,即可适应从边缘到中央控制器的各个级别。
通过使用可扩展的Ceva-SensPro雷达和视觉人工智能解决方案,实现这些目标是可能的。