近日,纳芯微宣布推出双码道游标算法电感编码器芯片MT6901,进一步完善其在高精度电机位置检测领域的产品组合。此前,公司已构建覆盖霍尔式与AMR磁阻式的磁编码器产品体系;随着 MT6901 的发布,形成了由磁编码器与电感编码器并行的技术布局,可覆盖从通用控制到高精度运动控制的不同需求,为伺服电机、步进电机及机器人关节等应用场景提供位置反馈方案。
面向运动控制的电感式位置检测方案
编码器是工业电机位置反馈的核心部件,其精度与稳定性直接影响了设备的控制性能。MT6901基于电涡流感应原理,结合双码道游标算法优势,在保证角度测量精度的同时提升环境适应能力。
芯片通过激励线圈生成高频电磁场,并由接收线圈获取经转子调制后的信号,实现位置解算。该检测模式对强磁场干扰、电磁噪声及污染物不敏感,可确保在粉尘、油污或振动较强等较为恶劣的工业环境中确保信号输出稳定可靠。
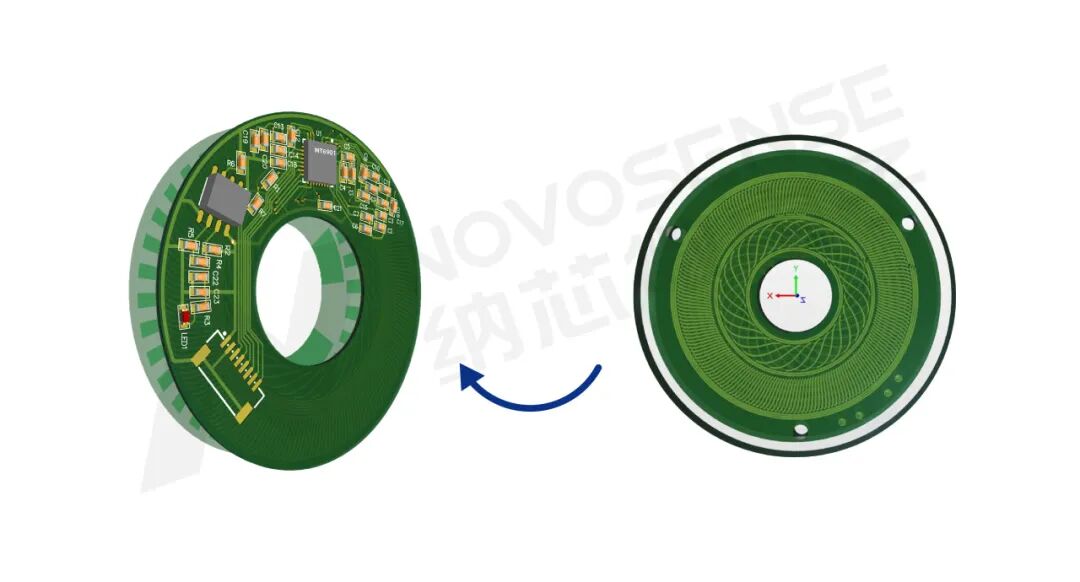
左图:编码器正面组件,集成MT6901芯片与外围器件;
右图:编码器背面感应线圈层,与正面共用同一PCB基板。
同时,MT6901拥有优秀的温漂特性,在温度变化场景中仍能保持高精度输出,整体可靠性显著优于传统方案。此外,该芯片同时支持电机旋转检测和直线运动控制,为各类工业设备与机器人系统的设计提供了更高的灵活度。
双码道游标算法与自校准机制提升角度精度
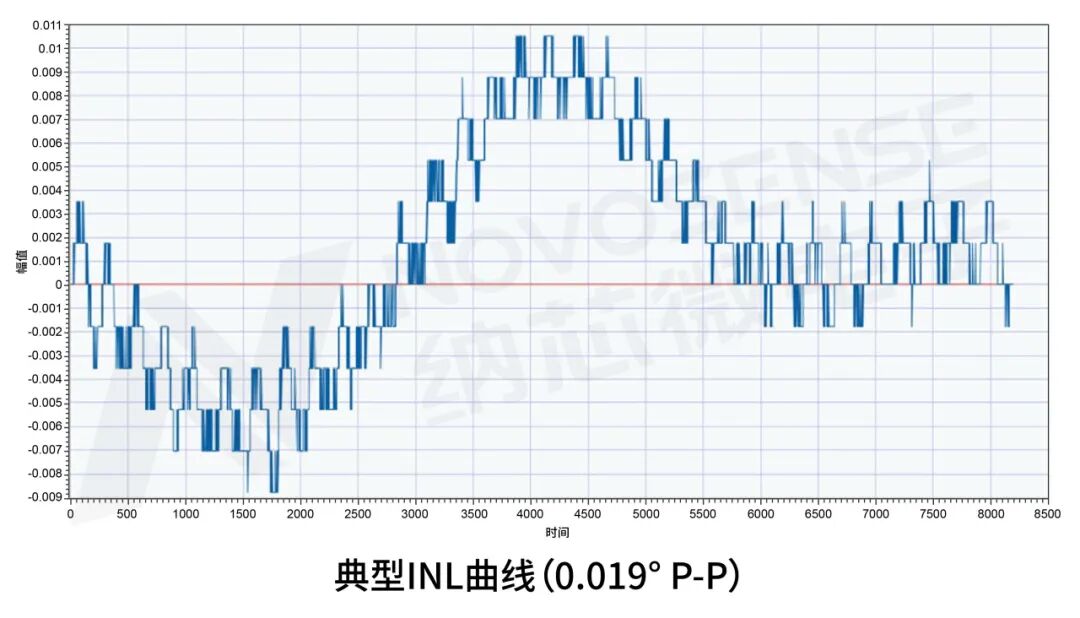
MT6901凭借双码道信号处理架构,集成了自校准机制,在完成系统标定后芯片的积分非线性(INL)典型值可达到±0.02°;该精度表现可覆盖部分高端运动控制应用需求,在保证角度检测精度的同时,避免了光学编码器在复杂工业环境下易受干扰的可靠性问题,满足机器人关节等对动态响应和轨迹精度要求较高的场景。
支持离轴结构,适配复杂机械设计
MT6901支持离轴安装方式,相较于传统轴向安装方式,可简化机械结构,为一些特殊结构设计提供了可能。
在机器人关节应用中通常采用中空走线结构,以便在关节内部布置走线和电缆,电感式检测方案对导线电流干扰敏感度更低,抗干扰能力更强,结合离轴感应方式,可更好适配此类结构设计,简化装配并提升系统可靠性。
为满足不同电机控制系统需求,MT6901配备了丰富的接口输出方式,包括 ABZ、UVW、PWM 及数字通信接口:
ABZ:1–16384 PPR 可编程
UVW:支持 1–16 极对配置
PWM:12-bit 分辨率
SPI:21-bit 输出
UART:23-bit,最高 4.0 Mbps
持续完善机器人等智能终端相关的芯片布局
围绕机器人应用,纳芯微已形成覆盖“感知链+控制链”的芯片组合,包括角度编码器、电流与温度传感器、电机驱动、电源管理及接口器件,面向关节驱动、灵巧手及电源系统等应用提供芯片器件支持。
3月20日,纳芯微将参加工控网CAIMRS年度自动化+数字化产业年会,并进行磁传感器在机器人中的应用分享。MT6901电感式编码器新品也将在现场进行展示与功能演示,欢迎产业伙伴与工程师现场交流,探讨相关技术与应用实践。
江苏省南京市鼓楼区中央路329号南京香格里拉酒店3楼
欢迎各位莅临交流~